馬達位置方塊 | 樂高機器人EV3使用說明
馬達位置方塊
 |
馬達位置方塊從內置在中型馬達、大型馬達和 NXT 馬達中的馬達轉動感應器獲取資料。可以測量馬達的轉動量(以度或圈爲單位)。還可以獲取馬達運行時的當前功率級別。 馬達位置方塊還可以將旋轉量或功率級別與預設值進行比較以獲取邏輯(“是”或“否”)輸出。 有關馬達轉動感應器工作原理、它提供的資料以及程式範例的更多資訊,請參考使用馬達轉動感應器。 |




“重置”模式將旋轉量重置爲零(0 度或 0 圈)。使用馬達轉動感應器對馬達位置量的進一步測量將會相對於重置位置進行。
重置馬達轉動感應器不會影響馬達的功率級別或位置。僅影響馬達轉動感應器讀數。
有關程式範例,請參考使用馬達轉動感應器。
可用於馬達位置方塊的輸入取決於所選模式。可以將輸入值直接輸入到方塊中。或者,可以通過資料線從其他程式方塊的輸出提供輸入值。
| 輸入 | 類型 | 允許的值 | 備註 |
|---|---|---|---|
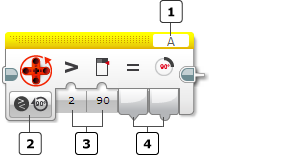
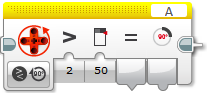
| 比較類型 | 數字 | 0 - 5 | 0:=(等於) 1:≠(不等於) 2:>(大於) 3:≥(大於或等於) 4:<(小於) 5:≤(小於或等於) |
| 預設值 | 數字 | 任何數字 | 要將感應器資料與之進行比較的值 |
可用輸出取決於所選模式。要使用某個輸出,請使用資料線將該輸出連接到另一個程式方塊。